Transplanting plugs
FlexPlanter
Transplanter that combines transplanting and selecting.

FlexPlanter XF
Ultra-high-speed transplanting line which transplant young plants into different grades.

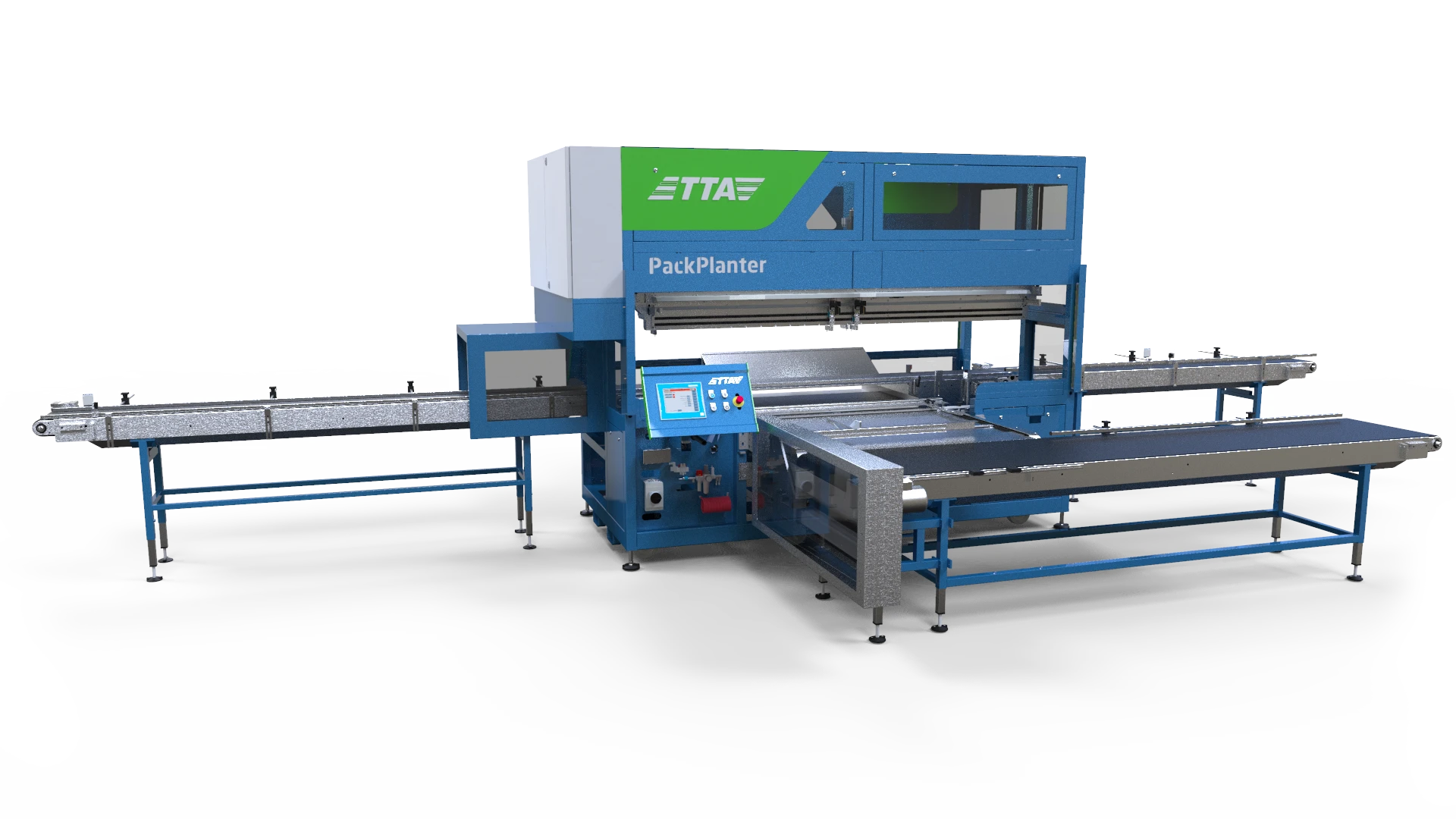
PackPlanter
High-tech transplanter for transplanting into trays, packs, or pots placed in shuttle trays.
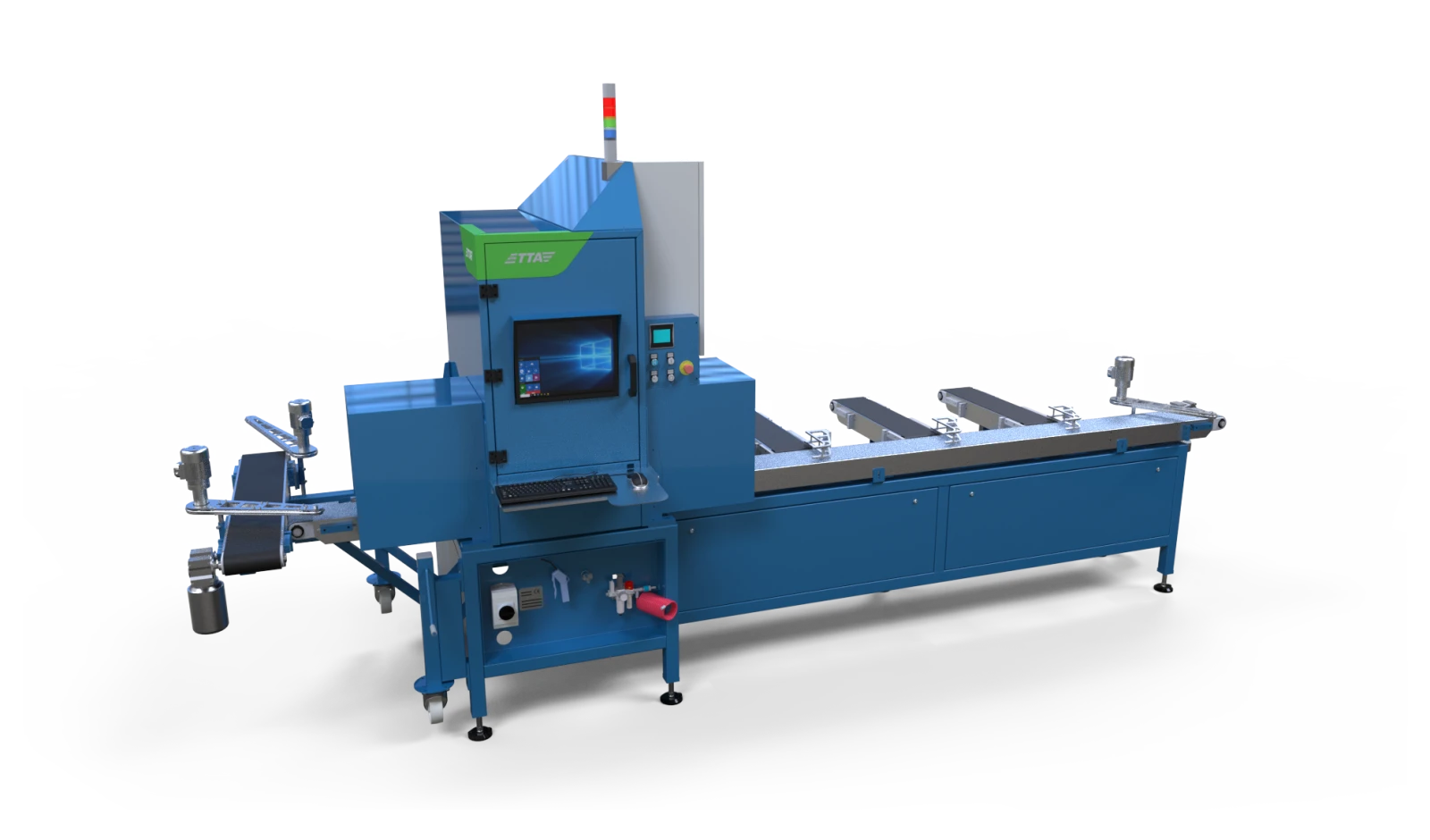
PackPlanter S
Flexible transplanter for all sorts of young plants.

MidiFlat
Transplanter with a capacity of 3,000 to 40,000 plants per hour.

MidiPot
Transplanting over a pot filler with a capacity of 3,000 to 16,000 plants per hour.

MidiCurve
Transplanting over a circular pot filler as well as over a conveyor belt for packs.

MidiVision
Allows for a combination of selection and transplanting.


Transplanting cuttings
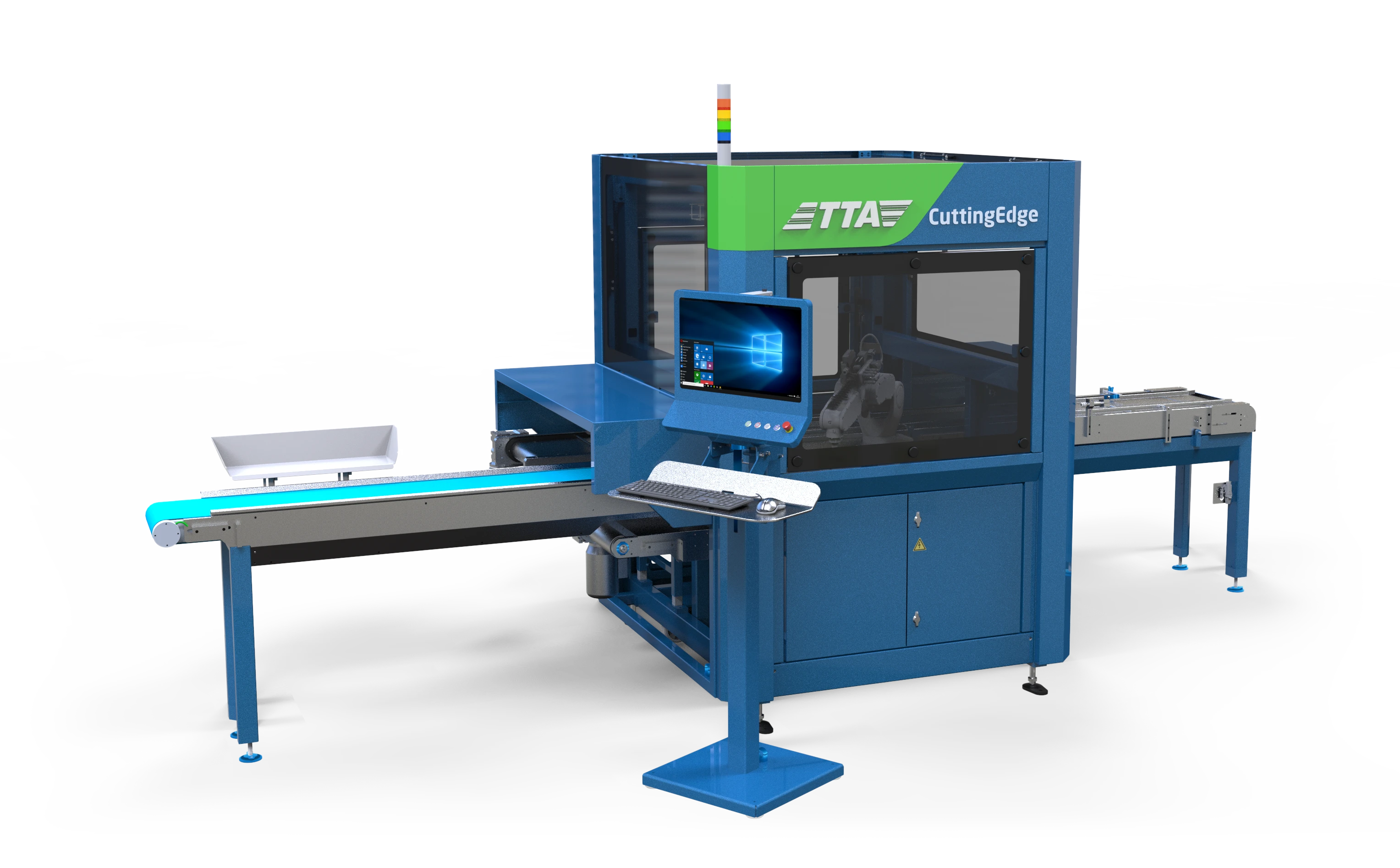
CuttingEdge Single
Single cutting planter with a capacity of 2.000 cuttings per hour.
CuttingEdge Double
Double cutting planter with a capacity of 4.000 - 5.000 cuttings per hour.
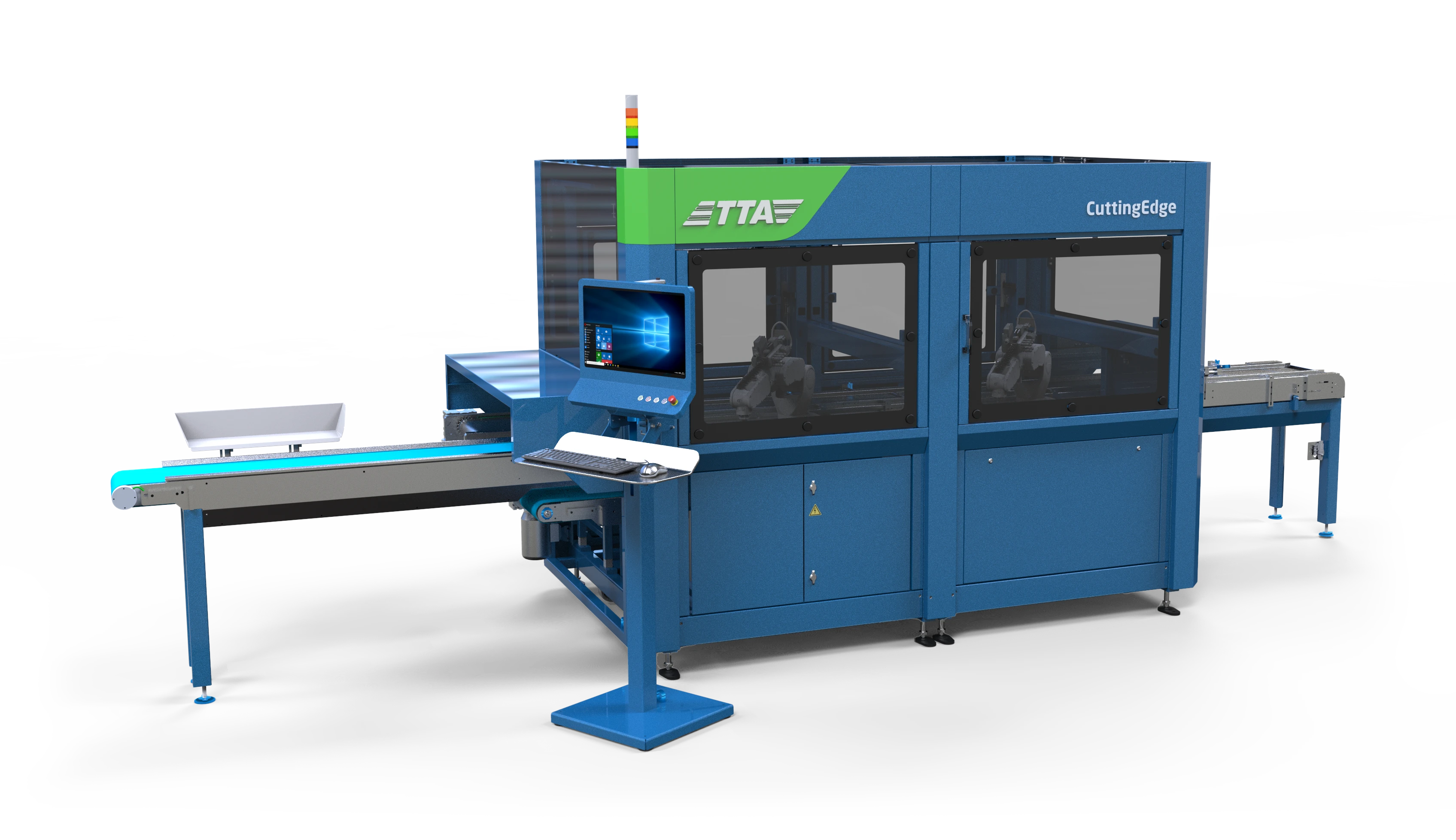
CuttingEdge Triple
Triple cutting planter with a capacity of 6.000 - 7.000 cuttings per hour.

Manual Sticking Line
A double conveyor system with stop positions for individual trays and corresponding work positions.


Sorting
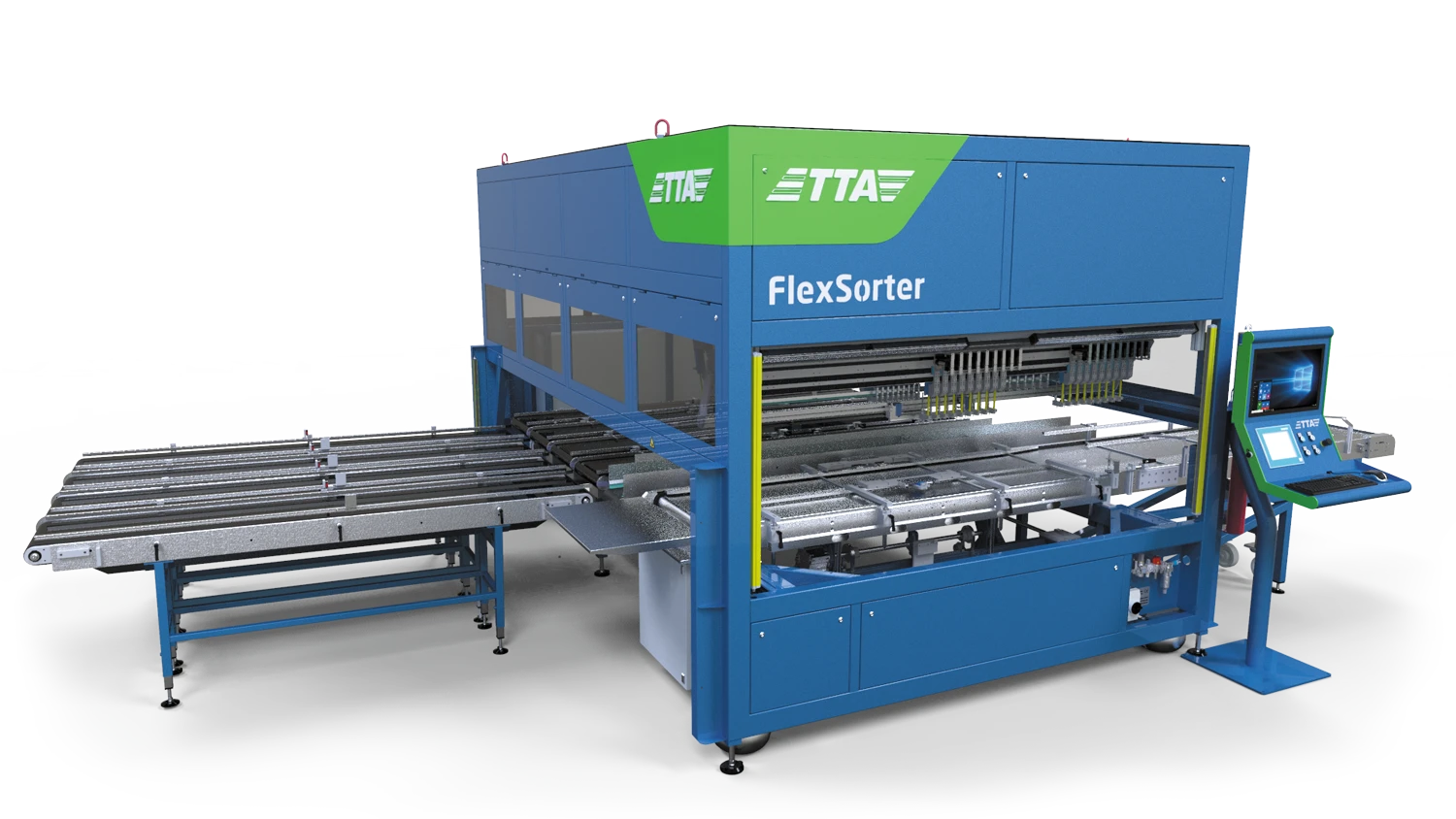
FlexSorter
The FlexSorter combines transplanting and multiple class selection into one simple step.
FlexSorter XF
Ultra high-speed grading line.

MidiVision
A combination of selection and transplanting.

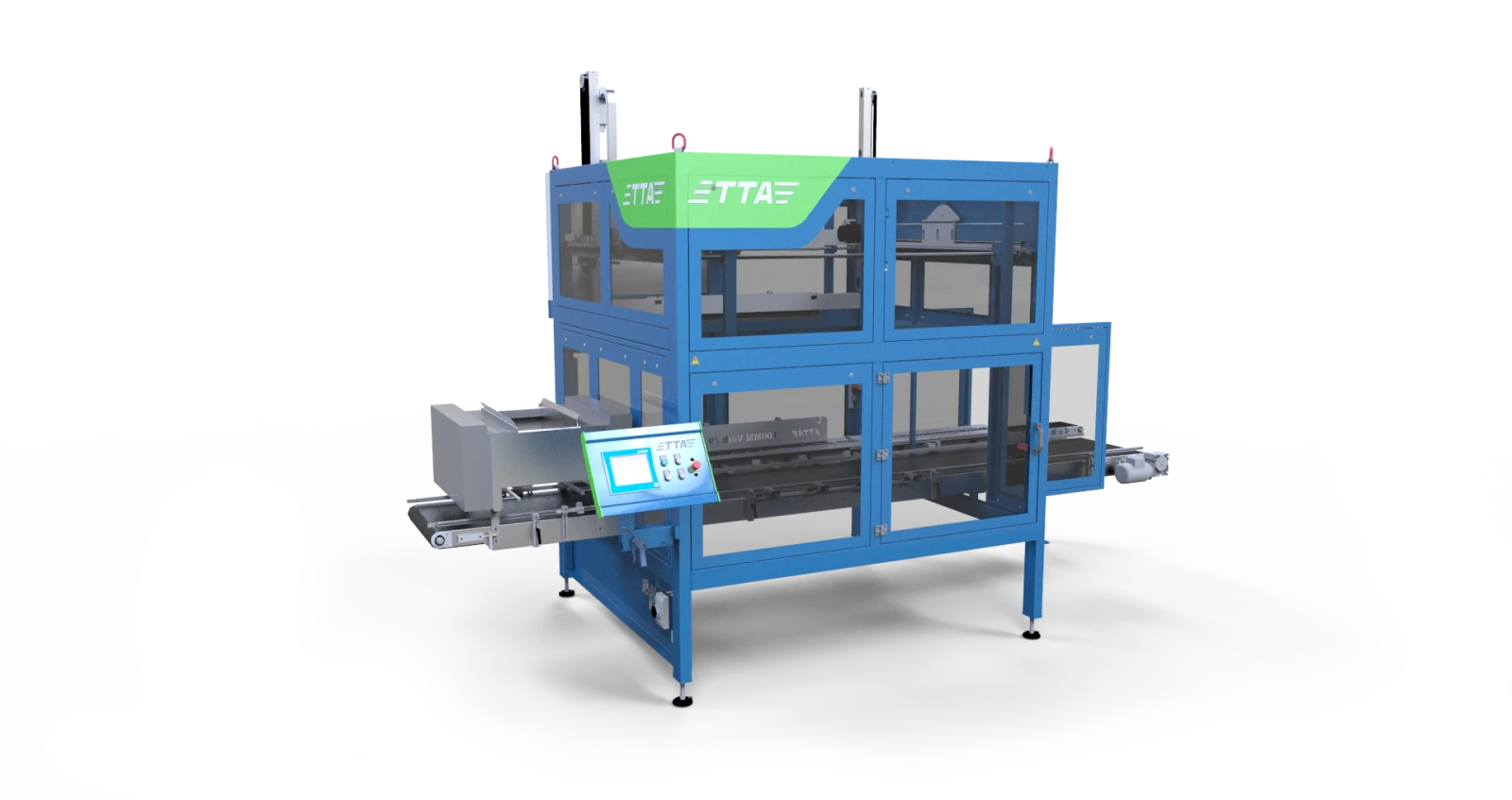
MaxSorter
High-speed grading machine for transplanting into a maximum of four grades.

FlexPlanter
Transplanter that combines transplanting and selecting.









.webp)

Various
Argos
Innovative solution for scanning and analyzing trolleys.

Drill Unit
Comprehensive solution for drilling & dibbling

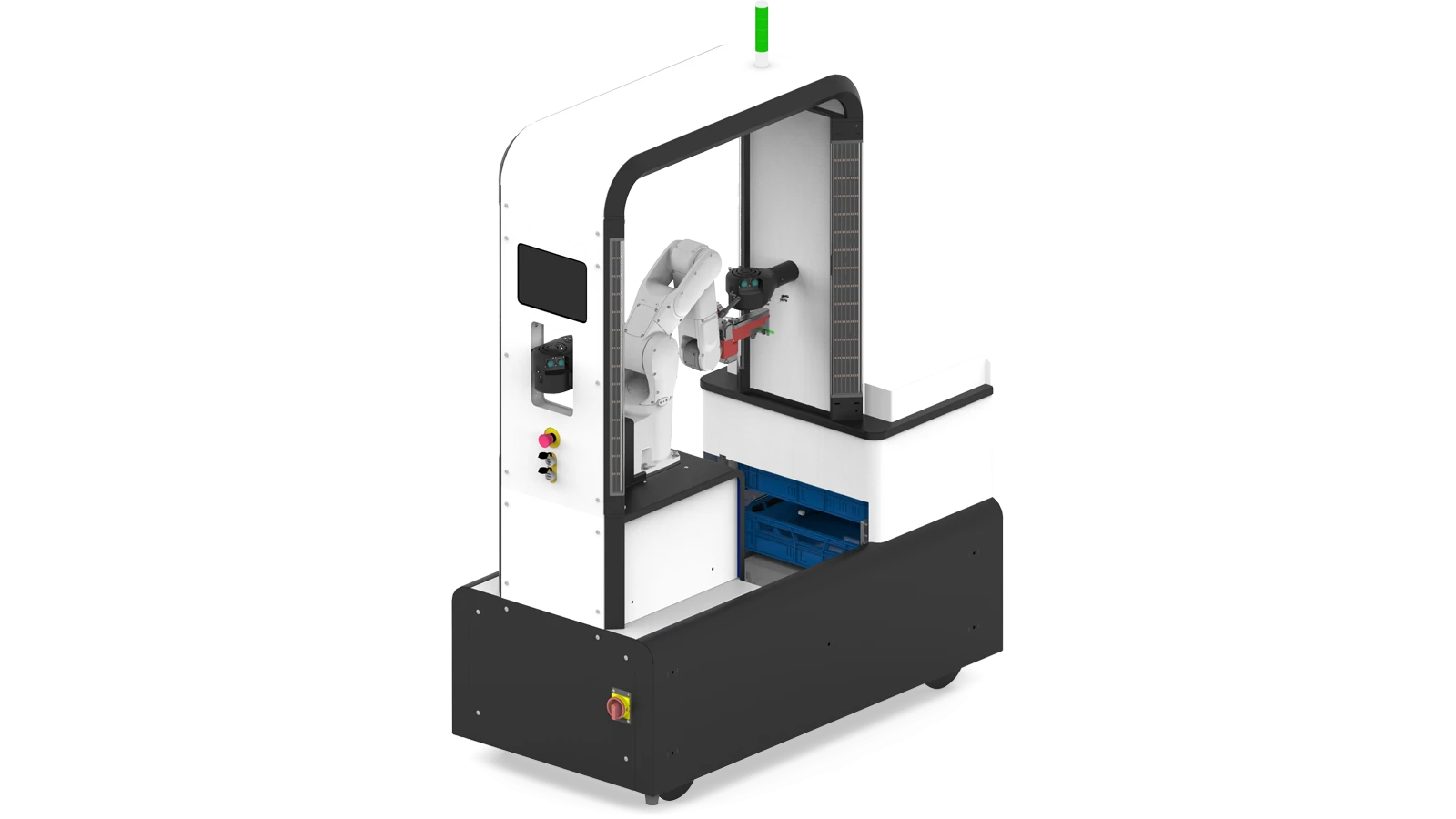
LINR
High-speed linear moving picking & placing robot.
TLF
TLF table and trolley loading system for flats/trays
HS4
Automatic application of handles on bedding plant packs.

PackDestacker
High-speed destacker for bedding packs.
FlexFiller
High-speed template filler with a minimum of recirculation substrate.
.webp)
PotDestacker
A compact machine designed for swift and precise destacking of pots.

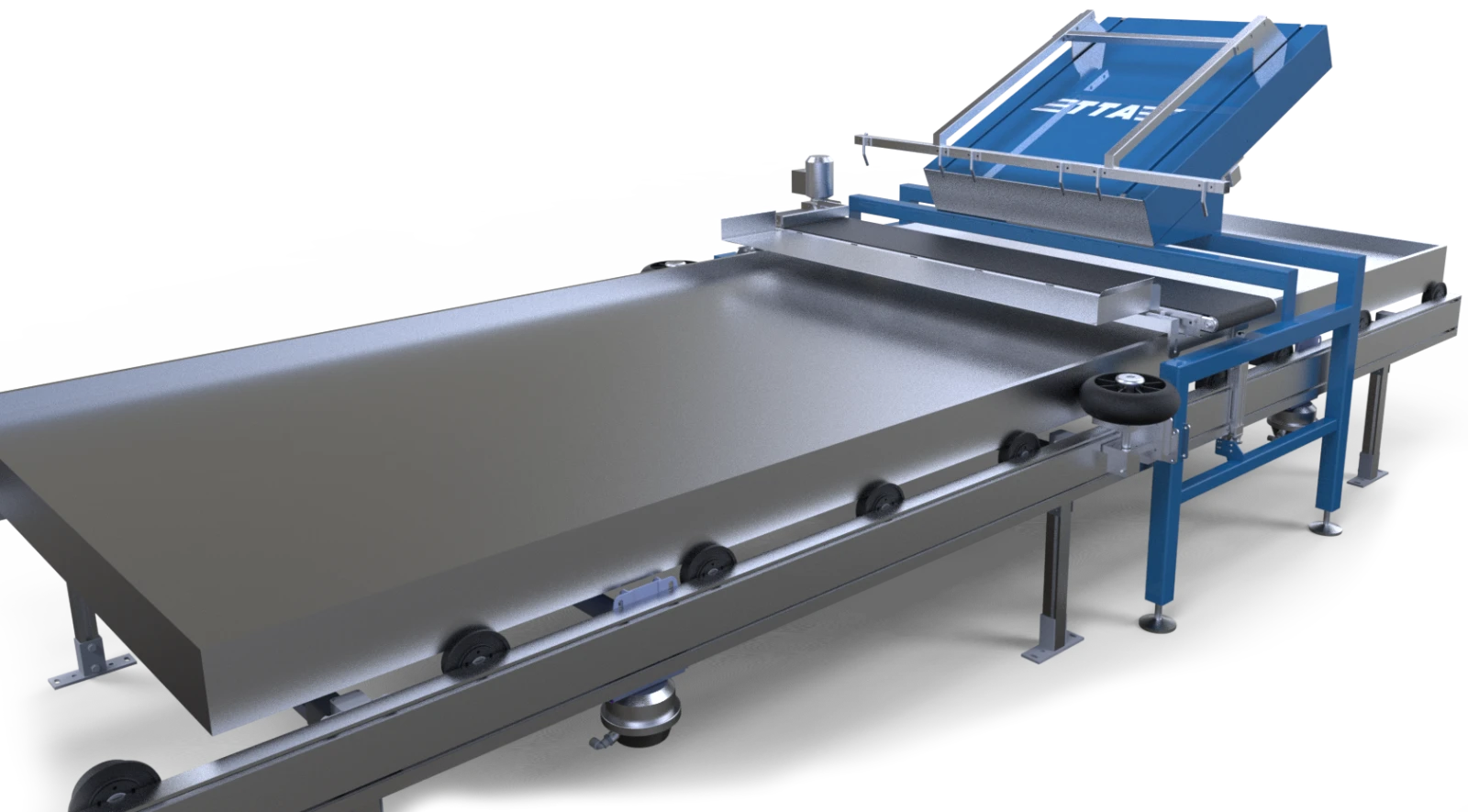
Watering line
A high-quality conveyor system in a stainless-steel drip bin.

PotSorter
A high-quality fully automatic grading line for pots.